4. Interrupts
04/03/2022 By Angold Wang
In the previous post, 3. Traps, we went through the actual xv6 code to illustrate the actual mechanics in the system call. I also mentioned at the begin of prev post, The “traps” mechanisim is used in 3 different situations: 1. System Call 2. Device Interrupt 3. Fault and Exceptions
Since the previous article covered the whole trap procedure (trampoline, recovery…) with actual xv6 code. Which is pretty much the same in these 3 situations. I’ll treat the “Trap” as an abstract procedure and this lecture will focus on things other than traps.
0. Device Driver (UART)
A driver is the code in an operating system that manages a particular device. Which: 1. Configures the device hardware. 2. Handles the resulting interrupts. 3. Tells the device to perform operations. 4. Interacts with processes that may be waiting for the I/O from the device.
While booting, xv6’s main calls
consoleinit to initialize the UART
hardware: * Generating a recieve interrupt when the
UART receives each byte of input. (In RHR) * Generating
a transmit complete interrupt each time the UART finishes sending a byte
of output. (In THR)
1. System Call
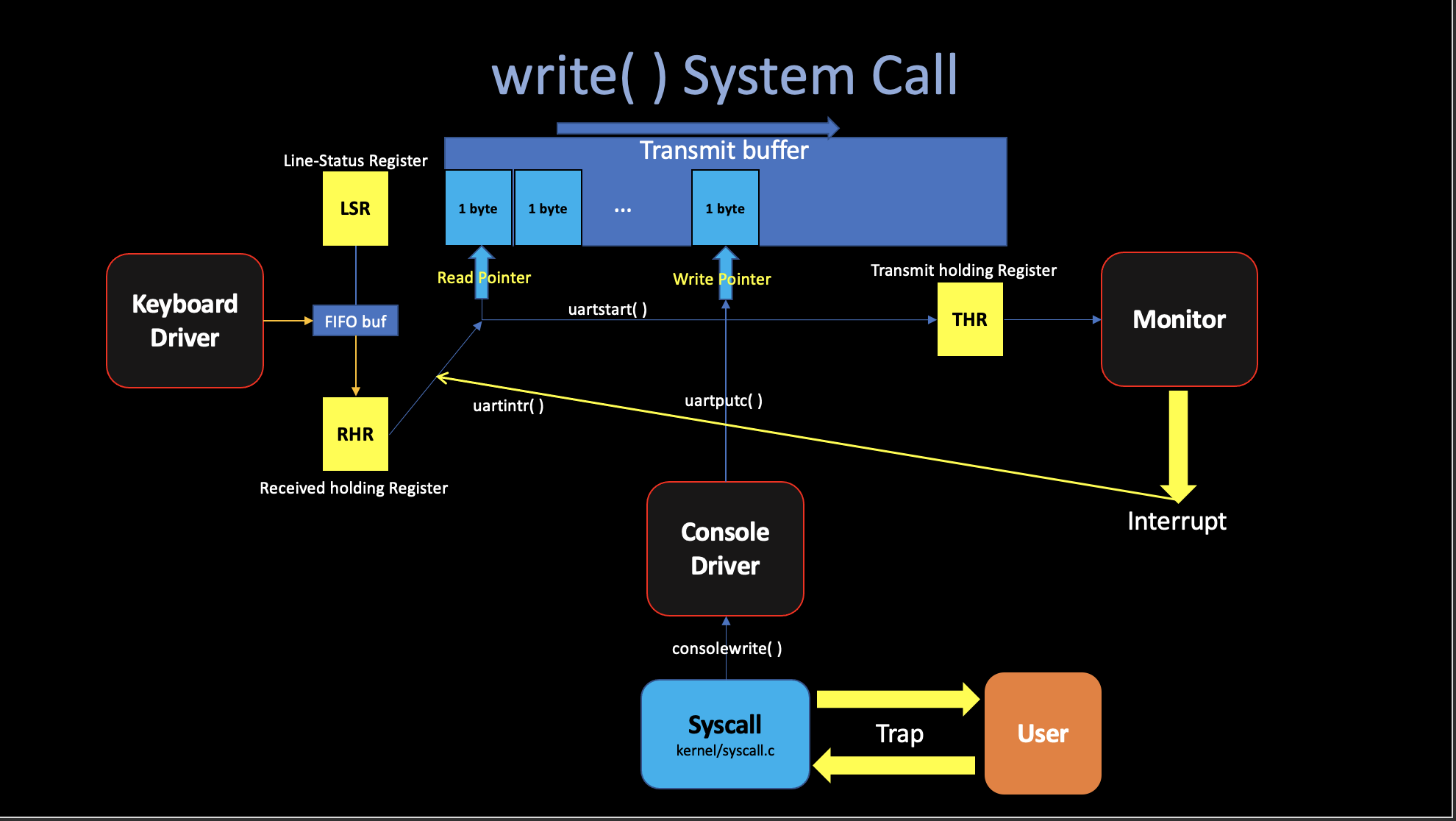
A system call will pause the current user-process, cause a trap which saves user’s current state… and jump to kernel space in order to execute the kernel syscall.
Let’s continue the actual write()
system call we mentioned last article. The way that shell indicate that
it is ready for user input is to print “$” in the console.
In the xv6 implementation, the shell calls fprintf
function, which will eventually make a system call
write(2, "$", 1).
fprintf(2, "$");Now we are in the kernel code, the write system call
eventually arrives at consolewrite()
located in kernel/console.c, which will write the stuff
byte-by-byte by calling uartputc(c).
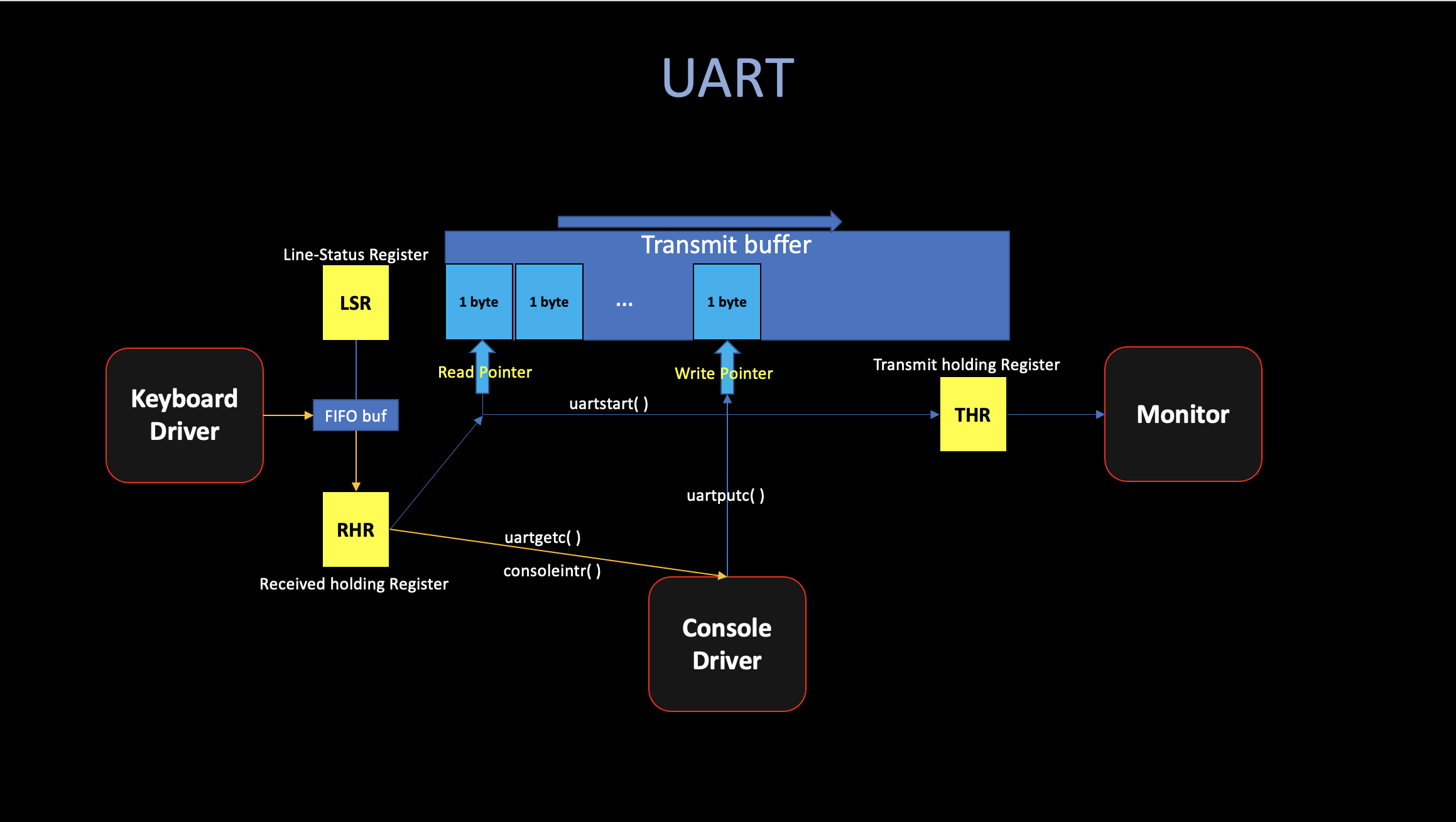
Like I show in the figure, the UART device maintains an output buffer
(uart_tx_buf) so that writing processes do not have
to wait for the UART to finish sending, this mechanism, called
asynchrony, separates device activity from process
activity through buffering and
interrupts. Instead,
uartputc appends each character to the
buffer, kick the UART hardware to start transmitting by calling
uartstart().
Basically, uartstart() writes the byte
pointed to by the current write pointer into the THE, which
is the transmit holding register. In our system, once you write
that byte into THR, the UART hardware will send the data to
the Console (Monitor) to draw that byte on your monitor.
Each time UART finishes sending a byte to console, it generates an
interrupt. After the trap uartintr() calls
uartstart() again, which hands the device
the next buffered output character… It will keep that loop (the yellow
arrow showing on the figure) until no data in the buffer (writep ==
readp).
2. Device Interrupts
There are basically two kinds of device interrupts – The Timer interrupts and others.
i. Device interrupts
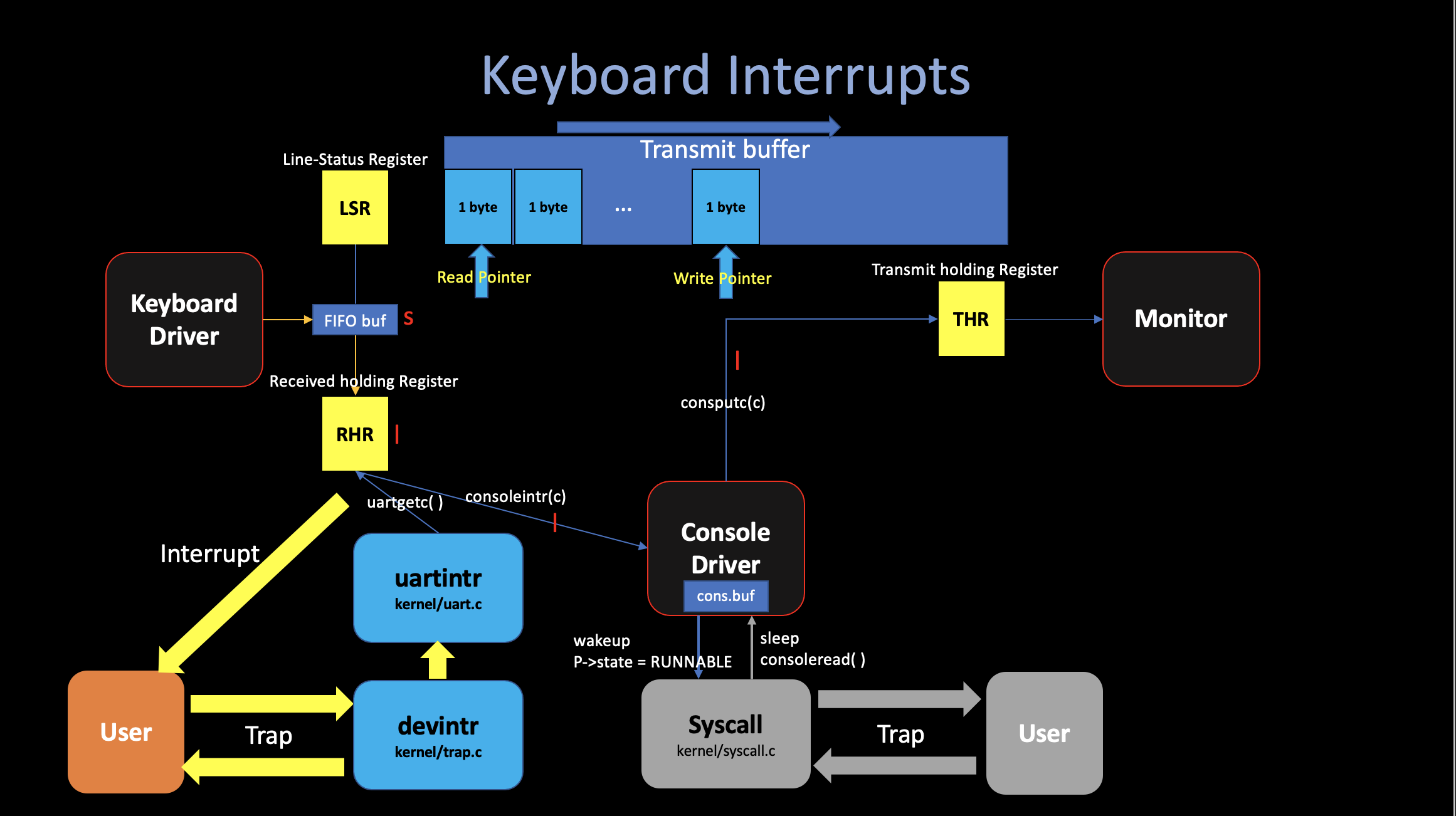
For the device interrups, typically, when a user types
“ls”, press enter in their keyboard and wants to pass
this command to the shell. The UART hardware asks the RISC=V to raise an
interrupt, The current user process will be interrupted and the xv6’s
trap handler will be activated. The trap handler calls
devintr (kernel/trap.c),
which looks at the RISC-V scause register to discover that
the interrupt is from an external device. Then it asks a hardware unit
called the PLIC to tell it which device interrupted. In
this case, it was the UART, devintr calls
uartintr.
uartintr reads any waiting input
characters from the UART hardware and hands them to
consoleintr, which accumulate
input characters in cons.buf until a whole line
arrives. The way is that
consoleintr treats backspace and a few
other characters specially. When a newline arrives, it wakes up a
waiting consoleread (if there is
one)(p->status = RUNNABLE), then back to the trap ret,
and resume the interrupted process.
Once woken, consoleread will observe a
full line in cons.buf, copy it to user space, and return
from the trap to the user space.
ii. Timer interrupts
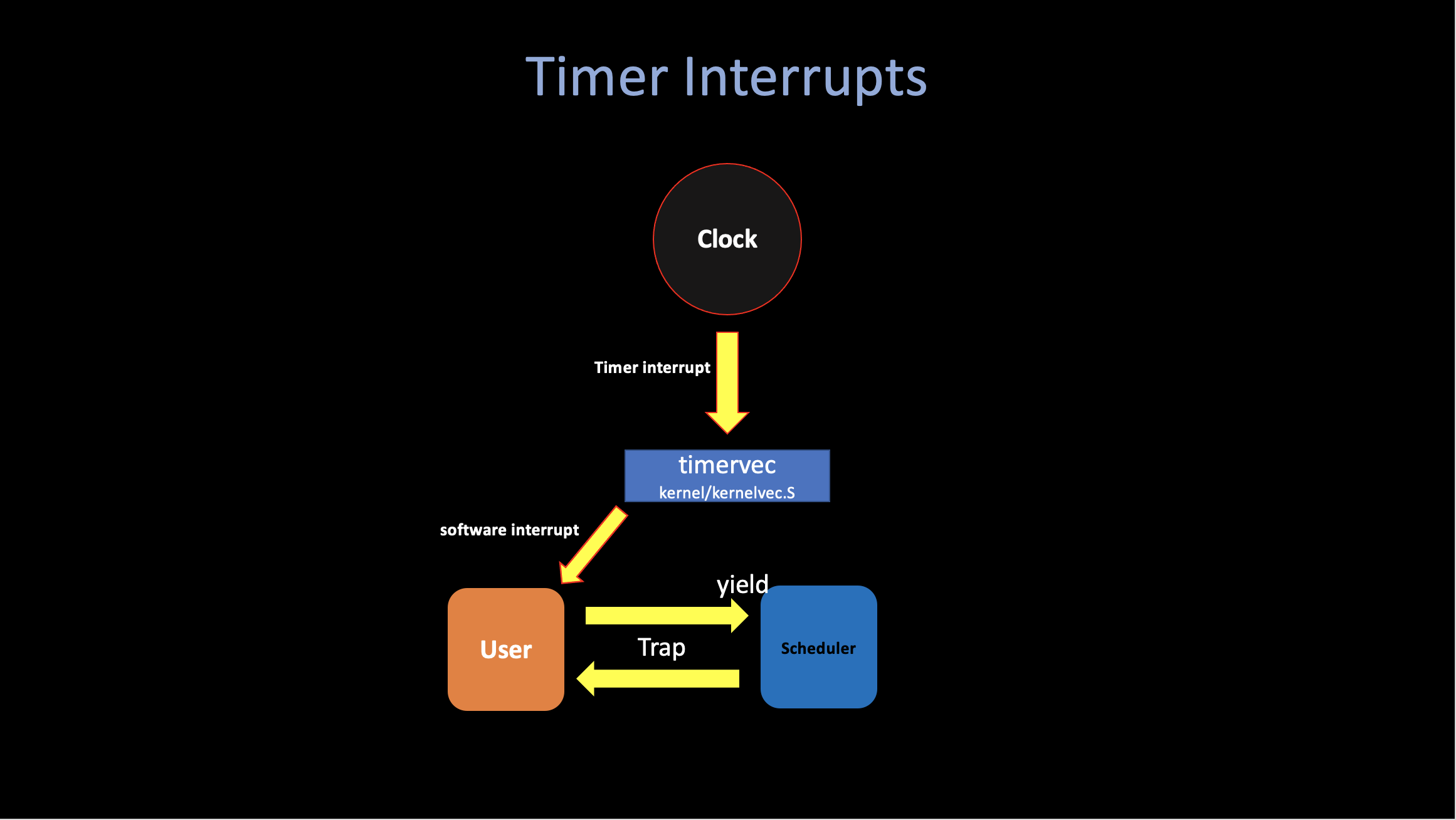
Xv6 uses timer interrupts to switch among different compute-bound process.
The code timerinit in
kernel/start.c initializing the clock hardware. Basically,
it sets mtvec to timervec
(kernel/kernelvec.S) in order to deal with each clock interrupts.
A timer interrpt can occur at any point when user or kernel
code is executing. The basic strategy to handle a clock
interrupt is to ask the RISC-V to raise a “software
interrupt” and then immediately return (then switch to
the sheduler’s context by calling yield() which we
will talk in great amount of details next post). The RISC-V delivers
software interrupts to the kernel with the ordinary trap
mechanism, and allows the kernel to disable them (very
important for code executing in critical section).
The xv6 makes sure that there will always be an interrupt while the code executing in the user space.
3. Fault and Exceptions
Xv6’s response to exceptions is quite boring: * If an exception happens in user space, the kernel kills the faulting process. * If an exception happens in the kernel, the kernel panics.
In the real sophisticated operating system, fault and exceptions often be responded in much more interesting ways.
i. Copy-on-Write
The problem
The fork() system call in xv6 copies all of the parent
process’s user-space memory into the child. If the parent is large,
copying can take a long time. Worse, the work is often largely wasted;
for example, a fork() followed by exec() in
the child will cause the child to discard the copied memory, probably
without ever using most of it. On the other hand, if both parent and
child use a page, and one or both writes it, a copy is truly needed.
The solution
The goal of copy-on-write (COW) fork() is to defer
allocating and copying physical memory pages for the child until the
copies are actually needed, if ever. COW fork() creates
just a pagetable for the child, with PTEs for user memory pointing to
the parent’s physical pages. COW fork() marks all the user
PTEs in both parent and child as not writable.
When either process tries to write one of these COW pages, the CPU will force a page fault. The kernel page-fault handler detects this case, allocates a page of physical memory for the faulting process, copies the original page into the new page, and modifies the relevant PTE in the faulting
process to refer to the new page, this time with the PTE marked writeable. When the page fault handler returns, the user process will be able to write its copy of the page.
6.S081 Lab6 Copy-on-write fork
ii. Lazy Allocation
One of the many neat tricks an O/S can play with page table hardware is lazy allocation of user-space heap memory.
Xv6 applications ask the kernel for heap memory using the
sbrk() system call. In the kernel we’ve given you,
sbrk() allocates physical memory and maps it into the
process’s virtual address space. It can take a long time for a kernel to
allocate and map memory for a large request. Consider, for example, that
a gigabyte consists of 262,144 4096-byte pages; that’s a
huge number of allocations even if each is individually cheap.
In addition, some programs allocate more memory than they actually
use (e.g., to implement sparse arrays), or allocate memory well in
advance of use. To allow sbrk() to complete more quickly in
these cases, sophisticated kernels allocate user memory lazily. That is,
sbrk() doesn’t allocate physical memory, but just remembers
which user addresses are allocated and marks those addresses as invalid
in the user page table.
When the process first tries to use any given page of lazily-allocated memory, the CPU generates a page fault, which the kernel handles by allocating physical memory, zeroing it, and mapping it.