Operating Systems Design and Implementation Notes
2. Interprocess Communication
By Jiawei Wang
In this note, we will look at some of the issues related to this
Interprocess Communication(IPC)
There are three
issues here:
1. How one process can pass information to another? 2.
How can we make sure two or more processes do not get into each other’s
way when engaging in critical activities? 3. How to make sure the
sequence of related processes?(i.e. one process must run after
another)
1. Thread
Thread is also called as “lightweight
process”.
Means there are often situations to have multiple
processes of control in the same address space. ###
Introduction Example: Codes/threads.c
int x = 2;
// threads shared memory
void* routine() {
x++;
printf("Test from threads %d\n", getpid());
sleep(3);
printf("The value of x is %d\n", x);
}
void* routine2() {
printf("Test from threads %d\n", getpid());
sleep(3);
printf("The value of x is %d\n", x);
}
int main(int argc, char* argv[]) {
pthread_t t1, t2;
// pthread_create 2nd parameter is the property of this thread
// 4th parameter is the arguments of function(3rd parameter)
if (pthread_create(&t1, NULL, &routine, NULL) != 0) return 1;
if (pthread_create(&t2, NULL, &routine2, NULL) != 0) return 2;
// pthread_join is used for waiting the return of the thread (otherwise the thread will not be executed)
// the 2nd parameter is the addr of storing the return value
pthread_join(t1, NULL);
pthread_join(t2, NULL);
return 0;
}We use the POSIX P-threads package to simulating threads in C
language.
Output:
❯ ./a.out
Test from threads 81205
Test from threads 81205
The value of x is 3
The value of x is 3These two threads shares the same address location and belong to the
same process.
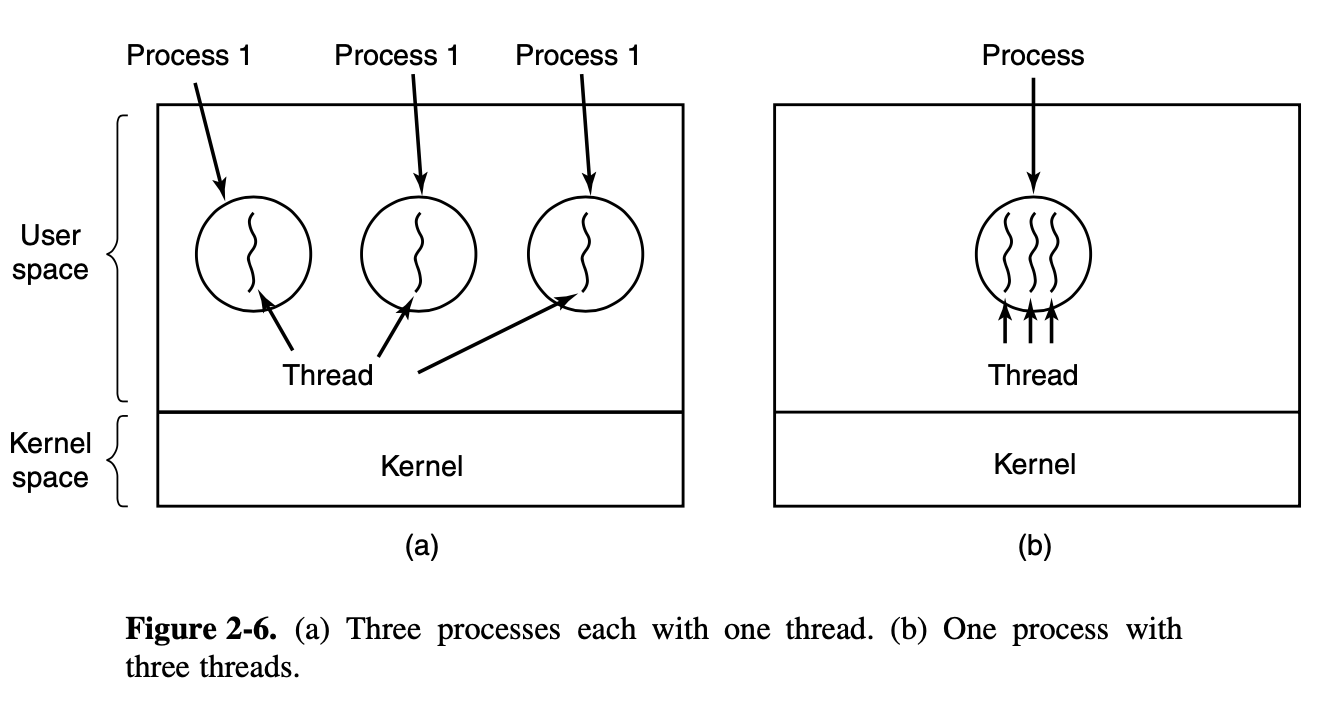
Thread vs Process
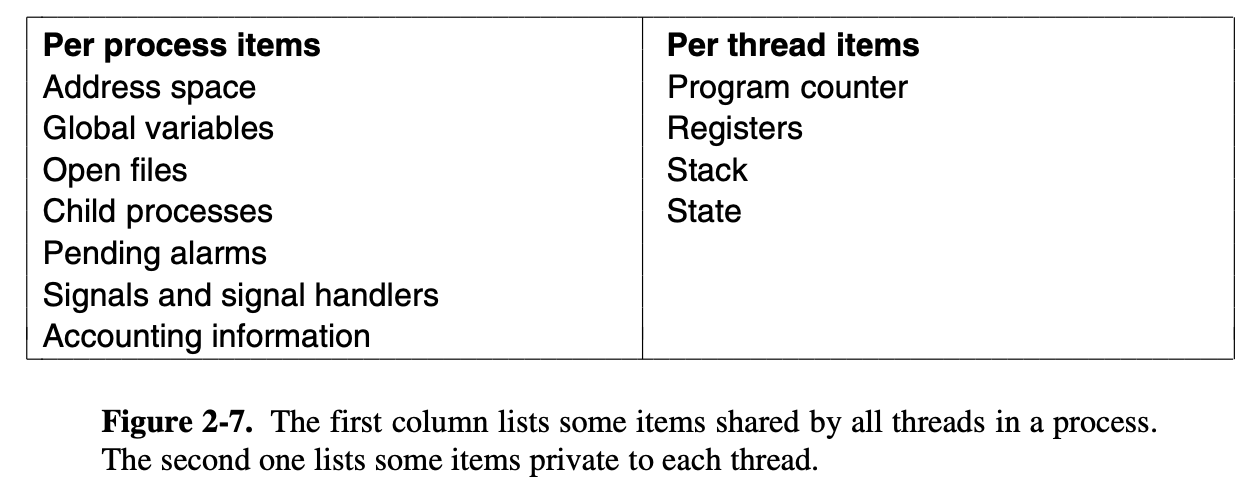
When several processes each have multiple threads, we have two levels of parallelism present:
1. Process level
- Process Scheduler (Inside kernel)
- Please refer OSDI 5. Process Scheduler
- Scheduling is absolutely required on two occasions:
- When a process exits. (
dequeue()) - When a process block(waiting) on I/O, or a semaphore.
(
enqueue())
- When a process exits. (
- Scheduling is not necessary but usually at these
times:
- When a new process is created.
(
enqueue()) - When an I/O (hardware) interrupt occurs.
(
hwint() -> dequeue() enqueue()) - When a clock interrupt occurs.
(
dequeue() + enqueue())
- When a new process is created.
(
2. Threads level
Thread Scheduler (“Inside” each process)
For the user-level threads:
- The kernel is not aware of the existence of threads, It operates as it always does.
- Picking a process e.g, A, and giving A control for its quantum.
- The thread scheduler inside A decides which thread to run, say A1.
- Since there are no clock interrupts to multiprogram threads, this thread may continue running as long as it wants to. If it uses up the process’ entire quantum, the kernel will select another process to run.
For the kernel-level threads:
- Unlike user-level, the kernel can pick a particular thread to run.
- Like process, the thread is given a quantum and is forceably suspended if it exceeds the quantum.
The major difference between user-level and kernel-level threads is the Performance
- Doing a thread switch with user-level threads takes a handful of machine instructions. since all threads will inside one address space.
- Switching kernel-level threads requires a full context switch. (changing the memory map, invalidating the cache)
Note that in order to facilitate implementation in C
language,
I will use threads instead of processes to introduce some
interprocess examples.
Below we will discuss the problem in
the context of threads.
But please keep in mind that
the same problems and solutions also apply to
processes.
2. Race Condition
Example: Codes/race.c
int mails = 0;
void* routine() {
for (int i = 0; i < 1000000; i++) {
mails++;
// read mails:
// movl _mails(%rip), %eax
// increment
// addl $1, %eax
// write mails
// movl %eax, _mails(%rip)
}
}
int main(int argc, char* argv[]) {
pthread_t p1, p2;
if (pthread_create(&p1, NULL, &routine, NULL) != 0) {
return 1;
}
if (pthread_create(&p2, NULL, &routine, NULL) != 0) {
return 2;
}
// waiting for threads finish
pthread_join(p1, NULL);
pthread_join(p2, NULL);
// race condition
printf("Number of mails: %d\n", mails); // Number of mails: 1289819
return 0;
}
}Before I give the output, let’s see the program - which plus
one to the mails (1000000 x 2) times
❯ ./a.out
Number of mails: 1289819But it give me the 1289819 instead of
2000000 we expected.
Why this
happend?
Processes or threads that are working together may share some common
storage that each one can read and write.
When two or more
processes(threads) are reading or writing some shared data at the same
time.
This may cause Race Condition.
This video
explains the causes of Race Condition.
When we check the assembly code of mail++;
inside the for loop:
movl _mails(%rip), %eax ## read mails
addl $1, %eax ## increment
movl %eax, _mails(%rip) ## write mailsAs I metioned in Introduction
to Processes:
> At any instant of time, the CPU is
running only one program
Imagine that when thread#1 executes at mail++. At that
time he executes the first line of the assembly code.
Which put the
current mail value into a CPU register %eax.
Then
assume the Prcocess Scheduler temporary blocked this
thread#1 let’s say the algorithm may think that it runs too long. And
let thread#2 who is waiting to run.
Let’s assume at that
time, the value of mail is 27. Now stored in
register %eax of thread#1.
Then thread#2 start
to run. At some time (like 0.1 secs after), the Process
Scheduler temporary blocked thread#2 and wake up thread#1
because of the same reason.
thread#2 add mails
multiple times, let’s assume the value of mails is
48.
Now here comes the Race
Condition:
Back to thread#1, When thread#1 restore all the
value of registers and start running
(movl %eax, _mails(%rip)).
Now the
mails becomes 28! instead of 49
we wished!
The difficulty above occurred because
thread#2 started using one of the shared variables before thread#1 was
finished with it.
3. Mutual Exclusion
How to avoid Race Conditions?
The key to
preventing trouble here and in many other situations involving shared
memory, shared files, and shared everything else is to find some way to
prohibit more than one process from reading and writing the
shared data at the same time.
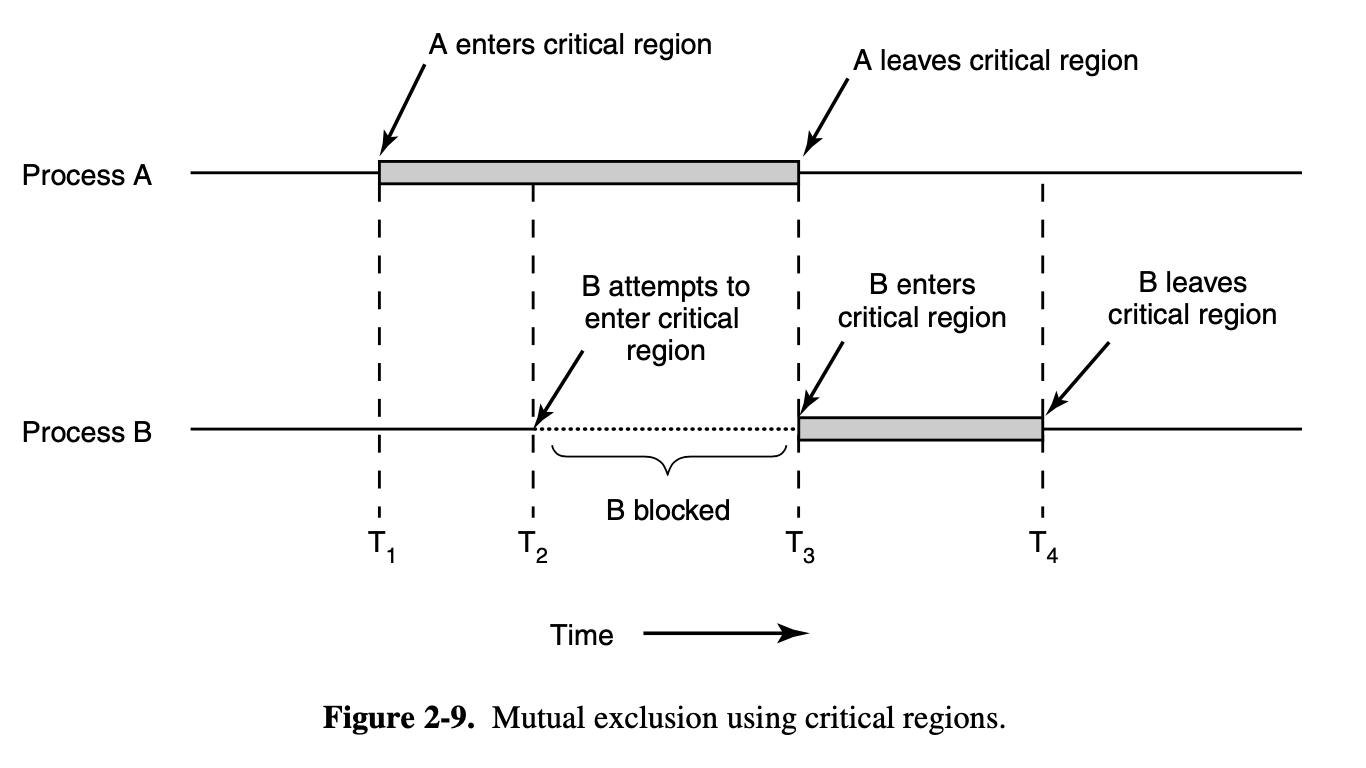
Put in other words, what we need is mutual exclusion
— some way of making sure that if one process is using a shared variable
or file, the other processes will be excluded from doing the same
thing.
Here I will give two ways to avoid Race
Conditions: 1. Strict Alternation 2. Mutexes (Binary
Semaphore)
Strict Alternation
Example: Codes/mutual.c
int mails = 0;
int turn = 0;
void* routine1() {
for (int i = 0; i < 1000000; i++) {
while(turn != 0); // busy waiting
mails++;
turn = 1;
}
}
void* routine2() {
for (int i = 0; i < 1000000; i++) {
while(turn != 1); // busy waiting
mails++;
turn = 0;
}
}
int main(int argc, char* argv[]) {
pthread_t p1, p2;
if (pthread_create(&p1, NULL, &routine1, NULL) != 0) {
return 1;
}
if (pthread_create(&p2, NULL, &routine2, NULL) != 0) {
return 2;
}
// waiting for threads finish
pthread_join(p1, NULL);
pthread_join(p2, NULL);
// race condition
printf("Number of mails: %d\n", mails); // Number of mails: 2000000
return 0;
}By adding an int variable turn to the
program.
We can make sure in any time, only one thread can run in the
critical region.
This code gives us the right example in most cases.
But in some
cases, like thread#2 runs much long in noncritical region than
thread#1:
> Page 92:
When process 0 leaves the
critical region, it sets turn to 1, to allow process 1 to enter its
critical region.
Suppose that process 1 finishes its critical region
quickly, so both processes are in their noncritical regions, with turn
set to 0. Now process 0 executes its whole loop quickly, exiting its
critical region and setting turn to 1. At this point turn is 1 and both
processes are executing in their noncritical regions.
Suddenly, process 0 finishes its noncritical region and goes back to the top of its loop. Unfortunately, it is not permitted to enter its critical region now, because turn is 1 and process 1 is busy with its noncritical region. It hangs in its while loop until process 1 sets turn to 0. Put differently, taking turns is not a good idea when one of the processes is much slower than the other.
Another problem it will caused is called “Busy
Waiting”
Inside the for-loop each iterations, there is a
while-loop continuously testing a variable until some value
appearsm.
This is called busy waiting.
It should
usually be avoided, since it wastes CPU time. Only when there is a
reasonable expectation that the wait will be short is busy waiting
used.
Mutexes
A mutex is a variable that can be in one of two states:
unlocked or locked.
Two procedures are used with
mutexes:
* When a process (or thread) needs access to a
critical region, it calls mutex_lock().
If the mutex is
currently unlocked (meaning that the critical region is available), the
call succeeds and the calling thread is free to enter the critical
region.
* On the other hand, if the mutex is already locked, the
caller is blocked until the process in the critical region is finished
and calls mutex_unlock().
Example Codes/mutex.c
int mails = 0;
pthread_mutex_t mutex;
void* routine() {
for (int i = 0; i < 1000000; i++) {
pthread_mutex_lock(&mutex);
mails++; // any time, only one thread can run this instruction
pthread_mutex_unlock(&mutex);
}
}
int main(int argc, char* argv[]) {
pthread_t p1, p2;
pthread_mutex_init(&mutex, NULL); // deafult
if (pthread_create(&p1, NULL, &routine, NULL) != 0) {
return 1;
}
if (pthread_create(&p2, NULL, &routine, NULL) != 0) {
return 2;
}
// waiting for threads finish
pthread_join(p1, NULL);
pthread_join(p2, NULL);
pthread_mutex_destroy(&mutex);
printf("Number of mails: %d\n", mails); // Number of mails: 2000000
return 0;
}4. Condition Variable
Let’s now focus on the 3rd question we metioned in the
begining:
How to make sure the sequence of related processes?
Consider that case - A gas station.
Assumue that a gas station can produce 15 liter petrol per
seconds, and there are many cars waiting for refueling.
Each cars need to be fueled 40 liters once and then
leave.
In this case, we cannot recieve more
cars when the gas station is out of fuel.
There must have a
sequence between two events:
* The gas station has more than 40
liter gas. * Here comes the car to be refueled.
The solution lies in the introduction of condition
variables.
Along with three operations on them,
wait, signal
and boardcast.
waitThis action causes the calling process(thread) to block, and waiting for thesignalfrom other processes(threads) to wake it up.signalWake up one process(thread) waiting on this condition variable (if any).
If a signal is done on a condition variable on which several processes are waiting, only one of them, determined by the process scheduler, is revived.boardcastWake up all waiting processes(threads)
Example: Code/conditionvar.c
// condition variable -- for sequence
pthread_mutex_t mutexFuel;
pthread_cond_t condFuel;
int fuel = 0;
void* fuel_filling(void* arg) {
while (1) {
pthread_mutex_lock(&mutexFuel);
fuel += 15;
printf("Filled fuel... %d\n", fuel);
pthread_mutex_unlock(&mutexFuel);
pthread_cond_signal(&condFuel);
sleep(1);
}
}
void* car(void* arg) {
pthread_mutex_lock(&mutexFuel);
while (1) {
while (fuel < 40) {
printf("No fuel. Waiting...\n");
// every time when got a signal from other threads by calling pthread_cond_signal()
// it will be executed after that wait
pthread_cond_wait(&condFuel, &mutexFuel);
}
fuel -= 40;
printf("Got fuel. Now left: %d\n", fuel);
pthread_mutex_unlock(&mutexFuel);
}
}