Operating Systerms Design and Implementation Notes
By Jiawei Wang
6. System Calls (2)
- File System
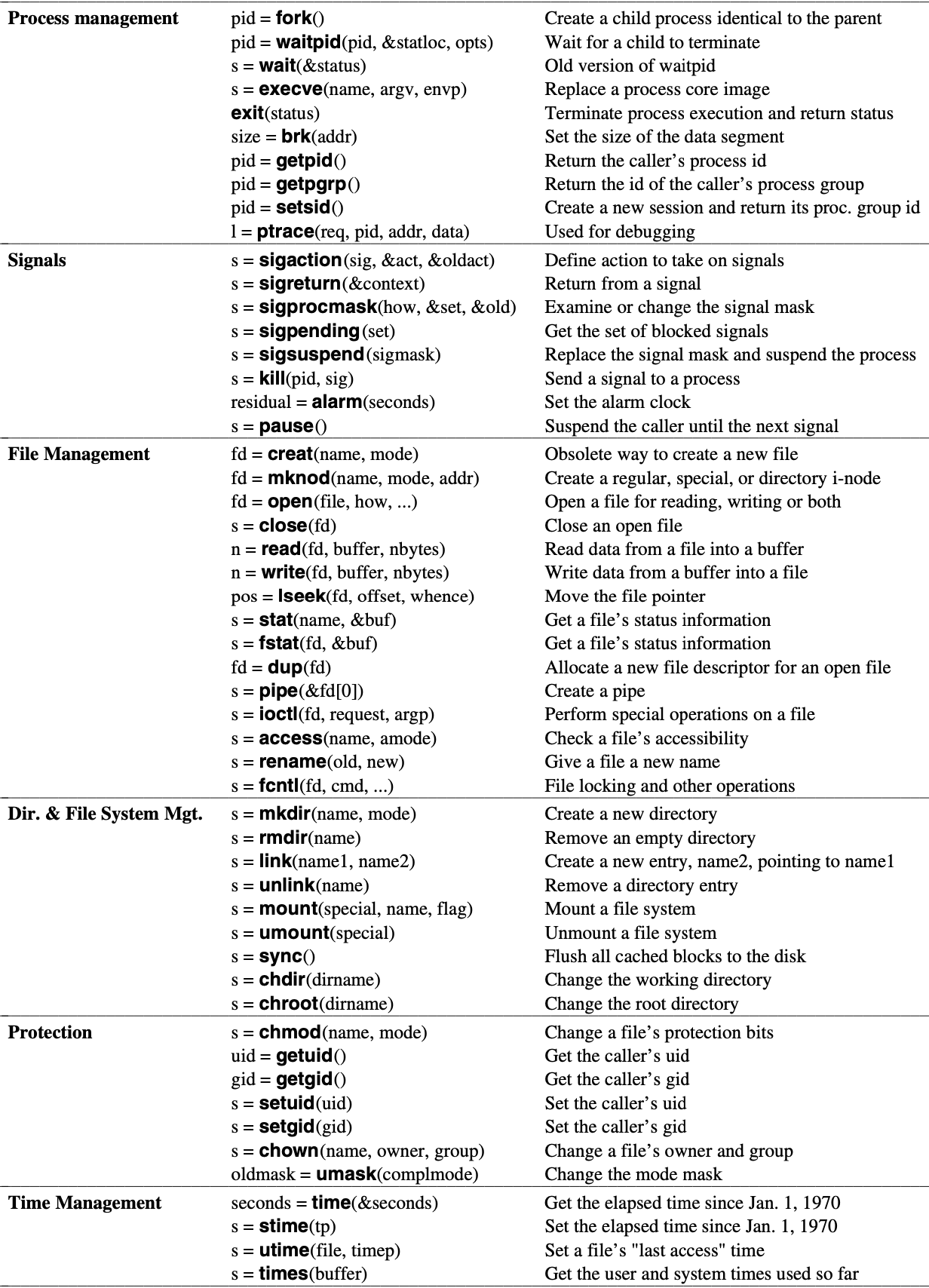
- System Calls for File
Management
- creat – create a file with name and protection mode
- mknod – create a special or ordinary file
- open – open file relative to directory file descriptor
- close – close a file descriptor
- read – read from a file descriptor
- write – write to a file descriptor
- lseek – reposition read/write file offset
- stat, fstat – get file status
- dup, dup2 – duplicate a file descriptor
- pipe – create pipe
- ioctl - control device
- fcntl – manipulate file descriptor
- access – check user’s permissions for a file
- rename – change the name or location of a file
File System
Before we try to understand the specific file system
calls
we need to have a general understanding of
the operating principle of the entire file system:
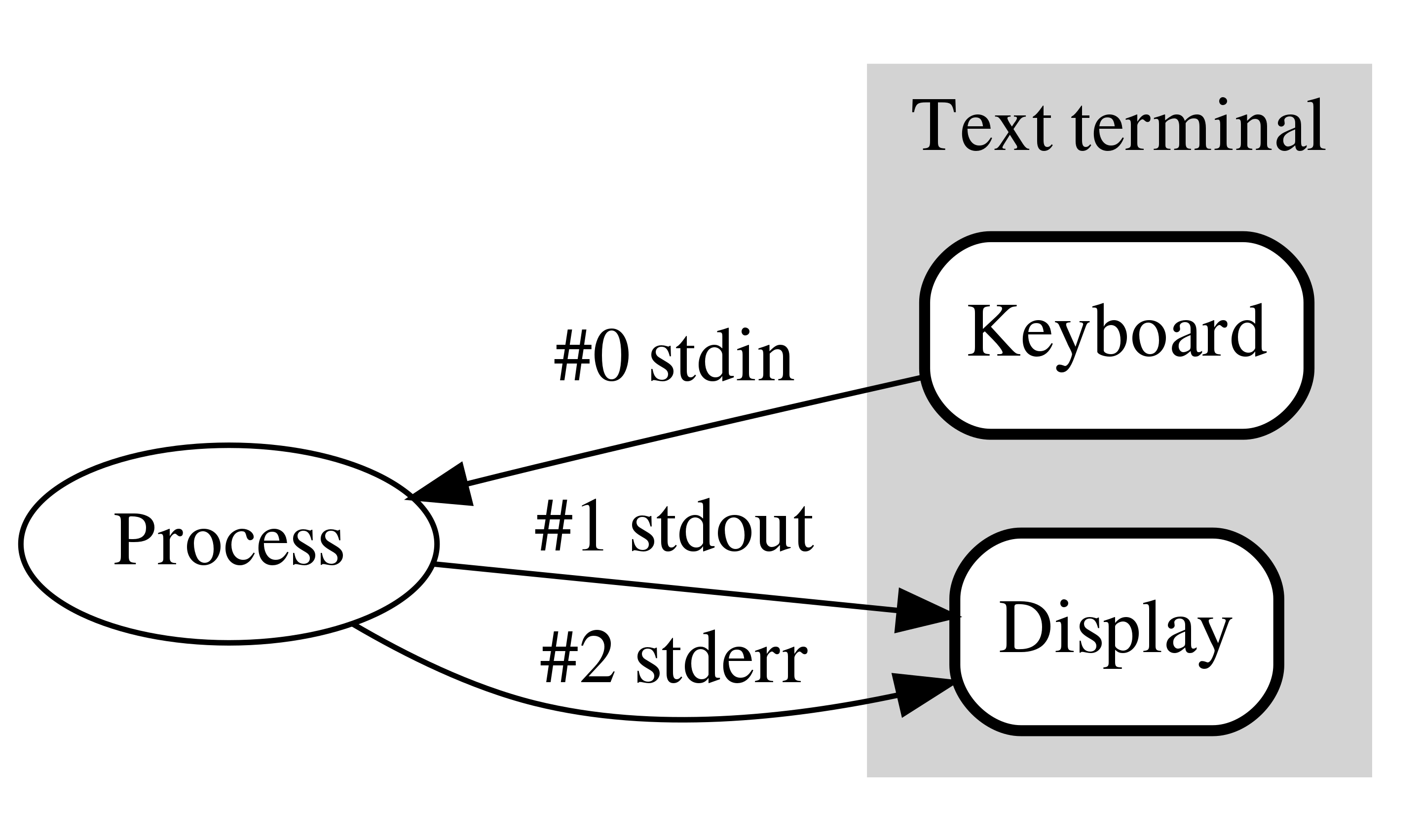
Standard Stream
In computer programming, standard
streams are interconnected input and output communication channels
between a computer program and its environment when it begins
execution.
Once a process is created, it will automatically creates a
standard stream by opening 3 files (stdin stdout stderr)
Once the process opens an existing file or creates a new file,
the kernel returns a file descriptor to the process.
Once the process involves IO operations, there must be a call
file descriptor.
To understand what is Standard Stream. let us see an example
in shell process:
In the last
Note we metioned that shell is a process which accept the user input
and creat child processes
Let’s briefly review the
process of shell reading instructions to create child
processes:
- Call getchar ( ) to read the input string from the terminal, separated by spaces, the first parameter is the file name, and the following parameters are the input parameters.
- Execute the system call fork() to generate a child process
- The child process executes the system call execve(), passes in the file name and input parameters to update the memory space of the child process, and points the program counter of the process to the first instruction. So far, the new process has been generated.
- If the parameter ends with & (in shell), the main
process continues to wait for input. On the contrary, the main process
executes the system call waitpid() until the child process is executed,
and then continues to wait for input.
In these steps above: the last step is very interesting.
Sometimes people will say that adding “&” after the command means
creating a background process
But I don’t think it
is the true background
process:
> from wikipedia:
A background
process is a computer process that runs behind the scenes (i.e., in the
background) and without user intervention. Typical tasks for these
processes include logging, system monitoring, scheduling, and user
notification. The background process usually is a child process created
by a control process for processing a computing task. After creation,
the child process will run on its own, performing the task independent
of the control process, freeing the control process of performing that
task.
In this briefly description: “independent” is the key word.
If the background process cannot run with foreground process
independently. It will not be truly defined as this
name.
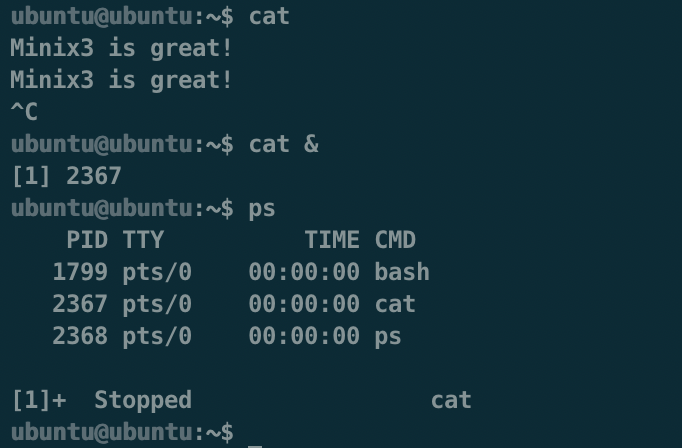
Let us see this command above – cat
The
independent cat command read the char from shell and
writing them to standard output.
In this figure. we
can find that: if we create a background cat process. Then
in shell we type ps command to let the shell write the
process status to standard output.
We will find
that the background process cat was stopped
unexpectly.
To understand why this error occurs. we need to figure out
These three Stand Stream – stdin stdout
stderr
As we metioned above : Once a
process is created, it will automatically creates a standard stream by
opening 3 files (stdin stdout stderr), which stand for standard input,
output, and error.
Samely, when shell open (we
create the shell process). it will also creates 3 standard stream. we
use lsof command to
view the file opened by a process.
> from
wikipedia:lsof is a command meaning “list open files”,
which is used in many Unix-like systems to report a list of all open
files and the processes that opened them.
Check out this code:
ubuntu@ubuntu:~$ ps
PID TTY TIME CMD
1799 pts/0 00:00:00 bash
2367 pts/0 00:00:00 cat
12849 pts/0 00:00:00 psubuntu@ubuntu:~$ lsof -p 1799
COMMAND PID USER FD TYPE DEVICE SIZE/OFF NODE NAME
bash 1799 ubuntu cwd DIR 179,2 4096 130305 /home/ubuntu
bash 1799 ubuntu rtd DIR 179,2 4096 2 /
bash 1799 ubuntu txt REG 179,2 1215072 1537 /usr/bin/bash
bash 1799 ubuntu mem REG 179,2 201272 8107 /usr/lib/locale/C.UTF-8/LC_CTYPE
bash 1799 ubuntu mem REG 179,2 51616 3407 /usr/lib/aarch64-linux-gnu/libnss_files-2.31.so
bash 1799 ubuntu mem REG 179,2 1518110 8106 /usr/lib/locale/C.UTF-8/LC_COLLATE
bash 1799 ubuntu mem REG 179,2 3035952 8118 /usr/lib/locale/locale-archive
bash 1799 ubuntu mem REG 179,2 1441800 3130 /usr/lib/aarch64-linux-gnu/libc-2.31.so
bash 1799 ubuntu mem REG 179,2 14528 3173 /usr/lib/aarch64-linux-gnu/libdl-2.31.so
bash 1799 ubuntu mem REG 179,2 187688 3534 /usr/lib/aarch64-linux-gnu/libtinfo.so.6.2
bash 1799 ubuntu mem REG 179,2 50 8114 /usr/lib/locale/C.UTF-8/LC_NUMERIC
bash 1799 ubuntu mem REG 179,2 3360 8117 /usr/lib/locale/C.UTF-8/LC_TIME
bash 1799 ubuntu mem REG 179,2 270 8112 /usr/lib/locale/C.UTF-8/LC_MONETARY
bash 1799 ubuntu mem REG 179,2 48 8111 /usr/lib/locale/C.UTF-8/LC_MESSAGES/SYS_LC_MESSAGES
bash 1799 ubuntu mem REG 179,2 34 8115 /usr/lib/locale/C.UTF-8/LC_PAPER
bash 1799 ubuntu mem REG 179,2 62 8113 /usr/lib/locale/C.UTF-8/LC_NAME
bash 1799 ubuntu mem REG 179,2 131 8105 /usr/lib/locale/C.UTF-8/LC_ADDRESS
bash 1799 ubuntu mem REG 179,2 146320 2803 /usr/lib/aarch64-linux-gnu/ld-2.31.so
bash 1799 ubuntu mem REG 179,2 47 8116 /usr/lib/locale/C.UTF-8/LC_TELEPHONE
bash 1799 ubuntu mem REG 179,2 23 8109 /usr/lib/locale/C.UTF-8/LC_MEASUREMENT
bash 1799 ubuntu mem REG 179,2 27004 2767 /usr/lib/aarch64-linux-gnu/gconv/gconv-modules.cache
bash 1799 ubuntu mem REG 179,2 252 8108 /usr/lib/locale/C.UTF-8/LC_IDENTIFICATION
bash 1799 ubuntu 0u CHR 136,0 0t0 3 /dev/pts/0
bash 1799 ubuntu 1u CHR 136,0 0t0 3 /dev/pts/0
bash 1799 ubuntu 2u CHR 136,0 0t0 3 /dev/pts/0
bash 1799 ubuntu 255u CHR 136,0 0t0 3 /dev/pts/0The 4-th column FD and the very next column TYPE correspond
to the File Descriptor and the File Descriptor type.
Some of the values for the FD can be:
cwd – Current Working Directory
txt – Text file
mem – Memory mapped file
mmap – Memory mapped deviceBut the real file descriptor is under:
NUMBER – Represent the actual file descriptor.The character after the number i.e “1u”, represents the mode
in which the file is opened. r for read, w for write, u for read and
write.
In this figure: we can find that the last
few lines were 3 different file descripter 0 1 and 2. And that is the
standard stream
bash 1799 ubuntu 0u CHR 136,0 0t0 3 /dev/pts/0
bash 1799 ubuntu 1u CHR 136,0 0t0 3 /dev/pts/0
bash 1799 ubuntu 2u CHR 136,0 0t0 3 /dev/pts/0You may ask yourself where are these file descriptors
physically and what is stored in /dev/pts/0 for instance.
The dev/ directory stands for device. It is
important that all things in linux-like system were files. so in this
place store all device file
(keyboard monitor etc.)
> from stackexchange
:
A tty is a regular terminal device (the console on your server, for
example).
A pts is a psuedo terminal slave (an xterm or an ssh
connection).
- Standard input – stand for 0 file descripter, is a stream from which a program reads its input data. For example, in shell process. The keyboard is the standard input, which means the keyboard directly write chars into that stdin file.
- Standard output – stand for 1 file descripter, is a stream to which a program writes its output data, Usually be the monitor.
- Standard error – is another output stream typically used by
programs to output error messages or diagnostics. It is a stream
independent of standard output and can be redirected
separately.
Let us back to that question: Why the background
cat program will be stopped?
Well, if
we check the inode of two Standard streams of two different
process.
COMMAND PID USER FD TYPE DEVICE SIZE/OFF NODE NAME
bash 1799 ubuntu 0u CHR 136,0 0t0 3 /dev/pts/0
bash 1799 ubuntu 1u CHR 136,0 0t0 3 /dev/pts/0
bash 1799 ubuntu 2u CHR 136,0 0t0 3 /dev/pts/0cat 2367 ubuntu 0u CHR 136,0 0t0 3 /dev/pts/0
cat 2367 ubuntu 1u CHR 136,0 0t0 3 /dev/pts/0
cat 2367 ubuntu 2u CHR 136,0 0t0 3 /dev/pts/0As we can see that: because of two processes’ standard stream
have the same Node number 3(we will talk about node number later), they
direct to the same file.
Because of this. When
background process cat is waiting for standard input from
keyboard (like the shell), if we type a command or other chars at shell.
the OS cannot distingushes which one from the standard input will be
executed. So the shell stopped the cat child process to
avoid error.
So what is Node number? and what is the File Descripter (fd)
?
The file descriptor (fd) is an index created
by the kernel to efficiently manage the opened file. It is a
non-negative integer used to refer to the opened file. All system calls
that perform I/O operations are Via file descriptor.
Each file descriptor will correspond to an open file, and at
the same time, different file descriptors will also point to the same
file. The same file can be opened by different processes or opened
multiple times in the same process.
The system maintains a file descriptor table for each
process. The value of the table starts from 0, so you will see the same
file descriptor in different processes. In this case, the same file
descriptor is possible Point to the same file, or it may point to
different files. The specific situation needs to be analyzed in detail.
To understand the specific situation, you need to look at the three data
structures maintained by the kernel.
- File Descripters
- File Table
- Inode Table
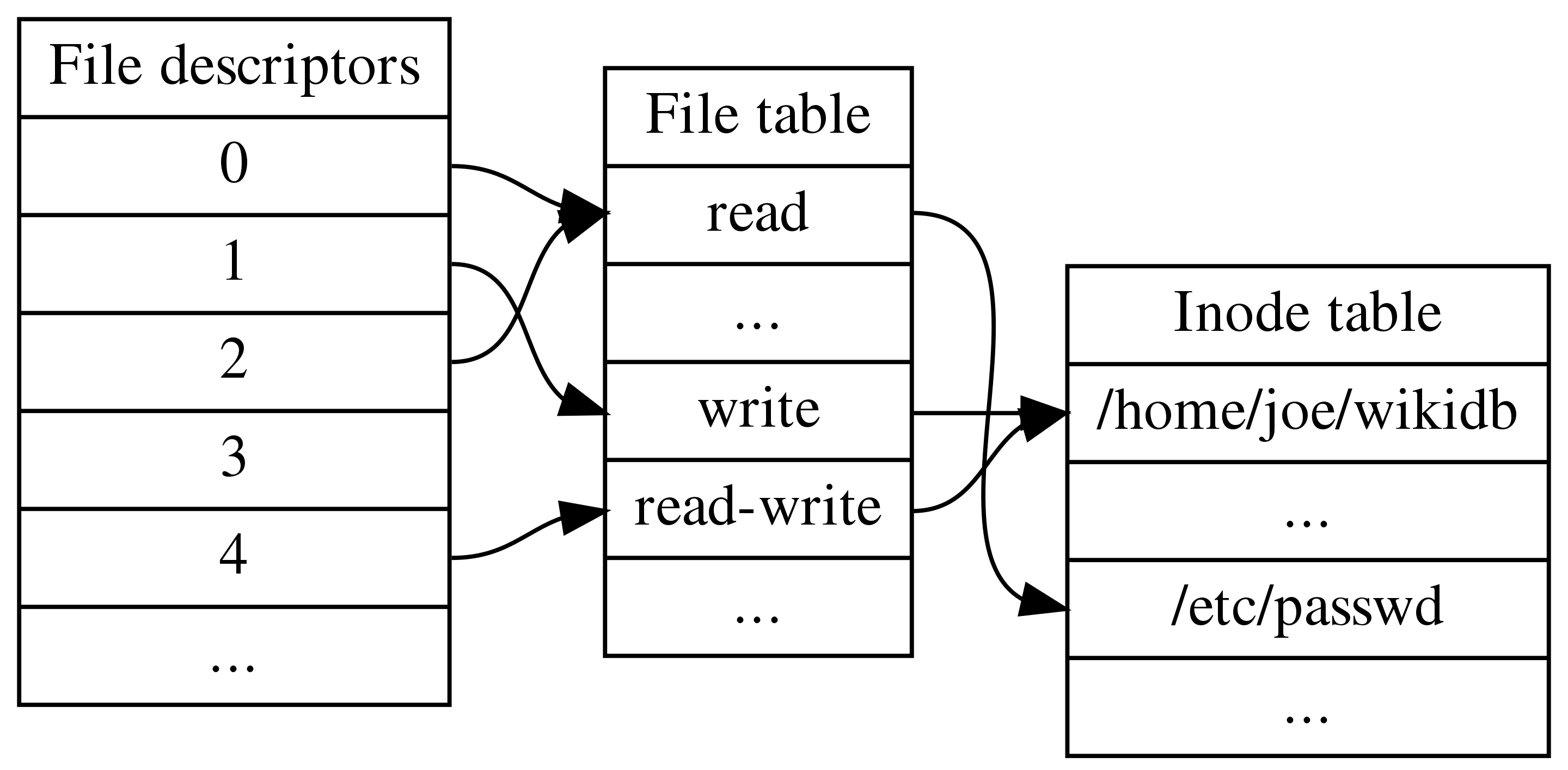
Three Data Structures inside The Kernel
The per-process file description table
For each process, the kernel maintains a table of open file
descriptors. Each entry in this table records information about a single
file descriptor(the one returned by the open() system
call), including:
- a set of flags controlling the operation of the file descriptor (actually there is just one such flag, the close-on-exec flag
- a reference to the open file description
The system-wide table of open file descriptions
An open file description stores all information relating an
open file. It’s also called open file table or open file handles.
Information includes: * the current file offset (as
updated by read() and write(), or explicitly
modified using lseek()) * status flags
specified when opening the file (i.e, the flags argument to
open()) * the file access mode (read-only,
write-only, or read-write, as specified in open())
* setting relating to signal-driven I/O * a
reference to the i-node object for this file
For more details. I will make a conclution when learning
implementation of File system
The file system i-node table
- file type (e.g, regular file, socket or FIFO) and permission
- a pointer to a list of blocks held on this file
- various properties of this file, including its size and time stamps, etc.
Here is a picture taken from the book The Linux Programming Interface, which
clearly depicts the relationship between file descriptors, open file
descriptions and i-nodes. In this situation, two processes have a number
of open file descriptors.
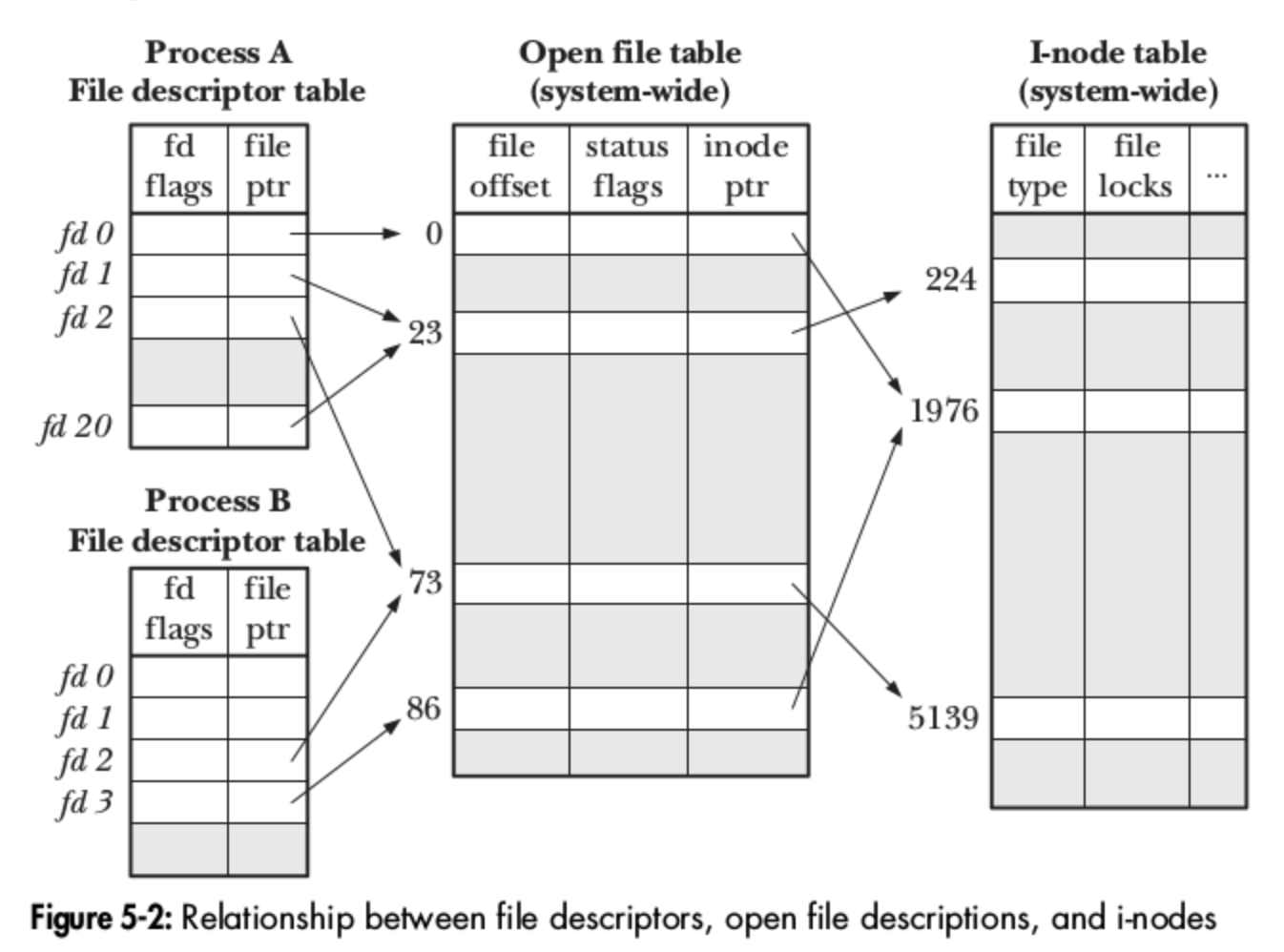
Let us do a little analysis on this diagram:
*
In this diagram, descriptors 1 and 20 of process A both refer to
the same open file description (labeled 23). This situation may arise as
a result of a call the dup() , dup2() or
fcntl() (which I will metioned later) *
Descriptor 2 of process A and descriptor 2 of process B refer to
a single open file description(73). This scenario could occur after a
call to fork()(i.e, process A is the parent of process B,
or vice versa), or if one process passes an open file descriptor to
another process using a UNIX domain socket. * Finally,
we see that descriptor 0 of process A and descriptor 3 of process B
refer to different open file descriptions, but that these descriptions
refer to the same i-node table entry (1976) – in other words, to the
same file. A similar situation could occur if a single process open the
same file twice.
After that conclution above: let’s see another
question:
Why does unix need these 3
tables?
See another example, then maybe we will get the key of the
implementation of Unix file system:
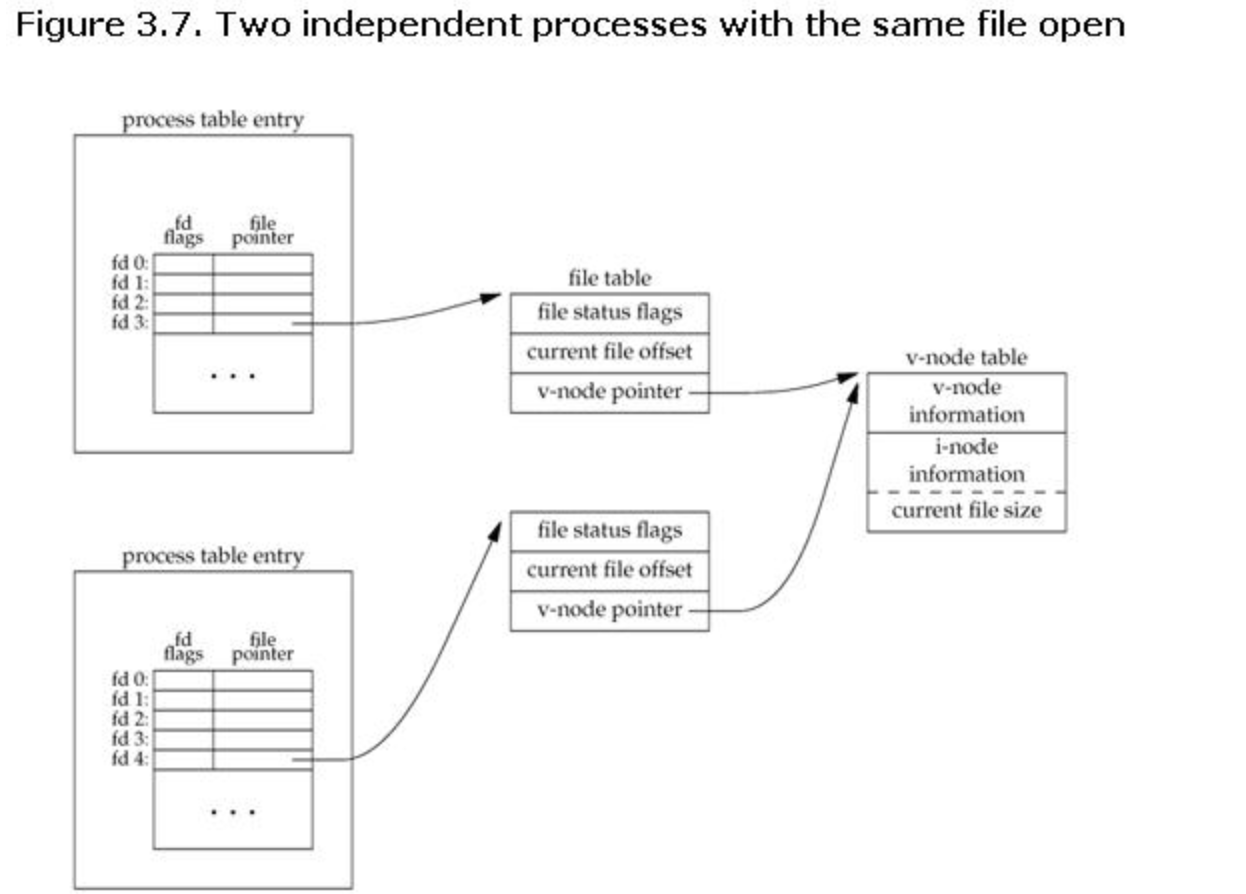
From that i-node table in that figure below: it is clear that
these two processes opened the same file.
But due
to the difference file table – these two processes don’t read the file
with same offset and other permissions (read write etc.)
In my case. This arrangement has these
advantages:
- This arrangement achieved independence between different
processes by making file table
- In this arrangement, users can flexibly choose the mode of
opening multiple files with different progress or the same
progress.
- Because of the file descripter. The processes just need to
pass the fd to the kernel to open files among the massive files. That
helps the process more efficient
System Calls for File Management
creat – create a file with name and protection mode
int creat
(const char pathname(pointer), mode_t mode);
fd = creat("abc", 0751)creates a file called abc with mode 0751 octal (in C, a
leading zero means that a constant is in octal). The low-order 9 bits of
0751 specify the rwx bits for the owner (7 means read-write-execute
permission), his group (5 means read- execute), and others (1 means
execute only).
Creat not only creates a new file
but also opens it for writing, regardless of the file’s mode. The file
descriptor returned, fd, can be used to write the file. If a creat is
done on an existing file, that file is truncated to length 0, provided,
of course, that the permissions are all right. The creat call is
obsolete, as open can now create new files, but it has been included for
backward compatibility.
mknod – create a special or ordinary file
int mknod
(const char pathname (pointer), mode_t mode, dev_t dev);
The system call mknod() creates a filesystem node (file, device
special file, or named pipe) named pathname, with attributes specified
by mode and dev.
Special files are created using mknod rather than creat. A typical call is:
fd = mknod(′′/dev/ttyc2′′, 020744, 0x0402);which creates a file named /dev/ttyc2 (the usual name for
console 2) and gives it mode 020744 octal (a character special file with
protection bits rwxr–r–). The third parameter contains the major device
(4) in the high-order byte and the minor device (2) in the low-order
byte. The major device could have been anything, but a file named
/dev/ttyc2 ought to be minor device 2. Calls to mknod fail
unless the caller is the superuser.
open – open file relative to directory file descriptor
int open
(const char path (pointer), int oflag, …);
Theopen() function shall establish the connection
between a file and a file descriptor. It shall create an open file
description that refers to a file and a file descriptor that refers to
that open file description. The file descriptor is used by other I/O
functions to refer to that file. The path argument points to a pathname
naming the file.
To read or write an existing file, the file must first be
opened using open. This call specifies the file name to be
opened, either as an absolute path name or relative to the working
directory, and a code of ORDONLY, OWRONLY, or ORDWR, meaning open for
reading, writing, or both. The file descriptor returned can then be used
for reading or writing.
close – close a file descriptor
int close
(int fd);
close() closes a file
descriptor, so that it no longer refers to any file and may be
reused.
After open a file, the file can be closed
by close, which makes the file descriptor available for reuse on a
subsequent creat or open.
read – read from a file descriptor
ssize_t read (int
fd, void buf (pointer), size_t count);
read() attempts to read up to count bytes from file
descriptor fd into the buffer starting at buf.
write – write to a file descriptor
ssize_t write
(int fd, const void buf (pointer), size_t count);
write() writes up to count bytes from the buffer
starting at buf to the file referred to by the file descriptor
fd.
On success, the number of bytes written is
returned. On error, -1 is returned, and errno is set to indicate the
cause of the error.
lseek – reposition read/write file offset
off_t lseek
(int fd, off_t offset, int whence);
lseek has three parameters: the first is the file
descriptor for the file, the second is a file position, and the third
tells whether the file position is relative to the beginning of the
file, the current position, or the end of the file. The value returned
by lseek is the absolute position in the file after changing the
pointer.
stat, fstat – get file status
int stat
(const char pathname (pointer), struct stat statbuf
(pointer));
int fstat (int fd, struct stat
statbuf(pointer));
stat() retrieves
information about the file pointed to by pathname;fstat()
is identical to stat(), except that the file about which
information is to be retrieved is specified by the file descriptor
fd.
The stat structure
All of these system calls return a
stat structure, which contains the following fields:
struct stat {
dev_t st_dev; /* ID of device containing file */
ino_t st_ino; /* Inode number */
mode_t st_mode; /* File type and mode */
nlink_t st_nlink; /* Number of hard links */
uid_t st_uid; /* User ID of owner */
gid_t st_gid; /* Group ID of owner */
dev_t st_rdev; /* Device ID (if special file) */
off_t st_size; /* Total size, in bytes */
blksize_t st_blksize; /* Block size for filesystem I/O */
blkcnt_t st_blocks; /* Number of 512B blocks allocated */
/* Since Linux 2.6, the kernel supports nanosecond
precision for the following timestamp fields.
For the details before Linux 2.6, see NOTES. */
struct timespec st_atim; /* Time of last access */
struct timespec st_mtim; /* Time of last modification */
struct timespec st_ctim; /* Time of last status change */
#define st_atime st_atim.tv_sec /* Backward compatibility */
#define st_mtime st_mtim.tv_sec
#define st_ctime st_ctim.tv_sec
};
dup, dup2 – duplicate a file descriptor
#include <unistd.h>int dup (int
oldfd);
int dup2 (int oldfd, int
newfd);
The dup() system call
creates a copy of the file descriptor oldfd, using the lowest-numbered
unused file descriptor for the new descriptor.
The
dup2() system call performs the same task as
dup(), but instead of using the lowest-numbered unused file
descriptor, it uses the file descriptor number specified in newfd. If
the file descriptor newfd was previously open, it is silently closed
before being reused.
Please notice that after
dup and dup2: two fd were both refer to the
same file in the file table.
pipe – create pipe
int pipe (int
pipefd[2]);
pipe() creates a pipe, a unidirectional
data channel that can be used for interprocess communication. The array
pipefd is used to return two file descriptors referring to the ends of
the pipe. pipefd[0] refers to the read end of the pipe. pipefd[1] refers
to the write end of the pipe. Data written to the write end of the pipe
is buffered by the kernel until it is read from the read end of the
pipe.
pipe system call creates a pipe and returns two file
descriptors, one for writing and one for reading.
Where fd is an array of two integers and fd[0] is the file
descriptor for reading and fd[1] is the one for writing.
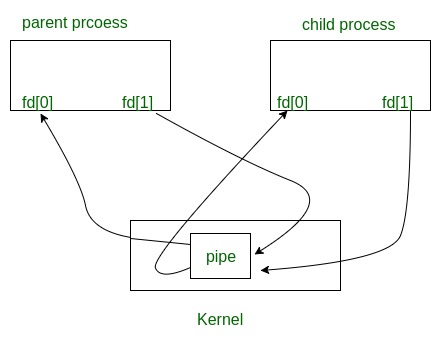
Typically, a fork comes next, and the parent closes the file
descriptor for reading and the child closes the file descriptor for
writing (or vice versa), so when they are done, one process can read the
pipe and the other can write on it.
Let us see an example
below:
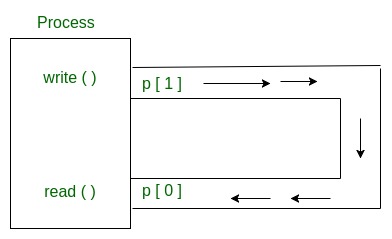
> Conceptually, a pipe is a connection
between two processes, such that the standard output from one process
becomes the standard input of the other process. In UNIX Operating
System, Pipes are useful for communication between related
processes(inter-process communication).
The pipe can be used by the creating process, as well as all its child processes, for reading and writing. One process can write to this “virtual file” or pipe and another related process can read from it.
If a process tries to read before something is written to the pipe, the process is suspended until something is written.
Pipe is one-way communication only i.e we can use a pipe such that One process write to the pipe, and the other process reads from the pipe. It opens a pipe, which is an area of main memory that is treated as a “virtual file”.
#include <stdio.h>
#include <unistd.h>
#define MSGSIZE 16
char* msg1 = "hello, world #1";
char* msg2 = "hello, world #2";
char* msg3 = "hello, world #3";
int main()
{
char inbuf[MSGSIZE];
int p[2], i;
if (pipe(p) < 0)
exit(1);
/* continued */
/* write pipe */
write(p[1], msg1, MSGSIZE);
write(p[1], msg2, MSGSIZE);
write(p[1], msg3, MSGSIZE);
for (i = 0; i < 3; i++) {
/* read pipe */
read(p[0], inbuf, MSGSIZE);
printf("% s\n", inbuf);
}
return 0;
}output:
hello, world #1
hello, world #2
hello, world #3In this figure below:
we create a pipe (line 15) and write
messages into it, then read them from the pipe and lead them to
stdout.
Pipes behave FIFO(First in First out), Pipe
behave like a queue data structure.
#include <stdio.h>
#include <unistd.h>
#define MSGSIZE 16
char* msg1 = "hello, world #1";
char* msg2 = "hello, world #2";
char* msg3 = "hello, world #3";
int main()
{
char inbuf[MSGSIZE];
int p[2], pid, nbytes;
if (pipe(p) < 0) /* create pipe */
exit(1);
if ((pid = fork()) > 0) {
/* parent process */
write(p[1], msg1, MSGSIZE); /* write into pipe */
write(p[1], msg2, MSGSIZE);
write(p[1], msg3, MSGSIZE);
/* close(p[1]);*/
wait(NULL); /* hang the current process and wait the child process finish */
/* if finished
}
else {
/* child process */
/* close(p[1]) */
while ((nbytes = read(p[0], inbuf, MSGSIZE)) > 0)
printf("% s\n", inbuf);
if (nbytes != 0)
exit(2);
printf("Finished reading\n");
}
return 0;
}output:
hello, world #1
hello, world #2
hello, world #3
(hangs) //program does not terminate but hangsHere, In this code After finishing reading/writing, both
parent and child block instead of terminating the process and that’s why
program hangs.
But if we add two line codes: two
annotatedclose(p[1]) In code block below (line 26 and 33),
the output will be:
hello, world #1
hello, world #2
hello, world #3
Finished readingIn Unix-like System:
* If pipe is empty
and we call read system call then Reads on the pipe will return EOF
(return value 0) if no process has the write end open. *
If some other process has the pipe open for writing, read will
block in anticipation of new data.
- Once a process write something into the pipe finished, remember to close the p[1].
- Samely. Before a process read someting from the pipe, remember to close the p[1].
About the difference between Pipe and File:
In Question12 this Chapter: there is an interesting
question > If there is no pipe in linux. Can two
processes communicate?
The answer absolutely is Yes. Because we can Let two
processes I/O with a file to achieve inter-process communication, but it
seems not efficient.
The Pipe we talked about is called Unnamed Pipe. There really
excist many common grounds between Pipe and file, such as Both of them
are the storiage in memory, and both of them can communicate with
processes.
The difference between pipe and
file:
* A pipe is a special file. The purpose of
inter-process communication is achieved by sharing the page pointed to
by the same inode. The pipe(file) does not exist in the real file
system.
- The commonality of pipelines is exclusivity, and only one process has the right to use the pipeline at the moment.
ioctl - control device
#include <sys/ioctl.h>ioctl (fd,
TCSETS, &termios);
Ioctl is the
device control interface function in the device driver. A character
device driver usually implements functions such as device opening,
closing, reading, and writing. In some situations that need to be
segmented, if you need to expand new functions, you usually add
ioctl() Implementation of the command.
- The first argument
fdrepresent to a file - The second argument
TCSETSindicates the protocol used for the opration - The third variable parameter is a pointer type, pointing to a custom structure struct msg.
Let us see an example to understand this system
call:
/* test_cmd.h */
1 #ifndef _TEST_CMD_H
2 #define _TEST_CMD_H
3
4 #define TEST_MAGIC 'x' //define magic number
5 #define TEST_MAX_NR 2 //define maximum arg ordinal
6
7 #define TEST_CLEAR _IO(TEST_MAGIC, 1) // a cmd switch case
8 #define TEST_OFFSET _IO(TEST_MAGIC, 2) // another cmd switch case
9
10 #endif /*_TEST_CMD_H*/The meaning of magic number and these marco above I will
metioned later
/* the device program */
/* test_ioctl.c */
int test_ioctl (struct inode *node, struct file *filp, unsigned int cmd, uns igned long arg)
{
int ret = 0;
struct _test_t *dev = filp->private_data;
if(_IOC_TYPE(cmd) != TEST_MAGIC) return - EINVAL;
if(_IOC_NR(cmd) > TEST_MAX_NR) return - EINVAL;
switch(cmd){
case TEST_CLEAR:
memset(dev->kbuf, 0, DEV_SIZE);
dev->cur_size = 0;
filp->f_pos = 0;
ret = 0;
break;
case TEST_OFFSET:
filp->f_pos += (int)arg; // change buffset with size(int arg)
P_DEBUG("change offset!\n");
ret = 0;
break;
default: /*when error*/
P_DEBUG("error cmd!\n");
ret = - EINVAL;
break;
}
return ret;
}/* Application program */
1 #include <stdio.h>
2 #include <sys/types.h>
3 #include <sys/stat.h>
4 #include <fcntl.h>
5 #include <sys/ioctl.h>
6
7 #include "test_cmd.h"
8
9 int main(void)
10 {
11 char buf[20];
12 int fd;
13 int ret;
14
15 fd = open("/dev/test", O_RDWR);
16 if(fd < 0)
17 {
18 perror("open");
19 return -1;
20 }
21
22 write(fd, "test", 10); //write first
23
24 ioctl(fd, TEST_OFFSET, -10); //change the offset
25
26 ret = read(fd, buf, 10); //read data
27 printf("<app> buf is [%s]\n", buf);
28 if(ret < 0)
29 {
30 perror("read");
31 }
32
33 close(fd);
34 return 0;cmd
Please consider that: If there are two different devices, but
the cmd of their ioctl is the same, someone accidentally
opens the wrong device and calls ioctl, and it’s done. Because this file
also has cmd corresponding implementation.
In order
to prevent this from happening, the kernel has a new definition of cmd,
which stipulates that cmd should be different
A cmd
is divided into 4 segments, each of which has its own
meaning:
----------------------------------------------------
| type | number | direction | size |
----------------------------------------------------
| 8bit | 8bit | 2bit | 14bit |
----------------------------------------------------1. A Magic number - 8 bits
2. A sequence number - 8 bits
3. Argument type (typically 14 bits), if any.
4. Direction of data transfer (2 bits).1. type ( magic number )
The magic number is a number between 0x00 to 0xff, This
number is used to distinguish between different drivers. Like the device
number application, the kernel has a document that gives some
recommended or used magic numbers:
/*Documentation/ioctl/ioctl-number.txt*/
'w' all CERN SCI driver
'y' 00-1F packet based user level communications
'z' 00-3F CAN bus card
'z' 40-7F CAN bus cardIn this example. We use ‘x’ to define our test device magic number
/* test_cmd.h */
4 #define TEST_MAGIC 'x' //define magic number2. number
Use this number to give your
own command number, which occupies 8bit (IOC_NRBITS).
3. direction – data transmission direction
2bit(IOC_DIRBITS). If it involves passing parameters, the kernel
requires a description of the direction of transmission, which is
described from the perspective of the application layer.
1) _IOC_NONE: The value is 0, no data transmission.
2) _IOC_READ: Value is 1, read data from the device driver.
3) _IOC_WRITE: The value is 2, write data to the device driver.
4)_IOC_READ|_IOC_WRITE: Two-way data transmission.4. Data size:
It is related to the
architecture. ARM occupies 14bit (IOC_SIZEBITS). If the data is int, the
value assigned by the kernel is sizeof(int).
the usage of ioctl
from stackoverflow:
An ioctl, which means “input-output control” is a kind of device-specific system call. There are only a few system calls in Linux (300-400), which are not enough to express all the unique functions devices may have.
e.g. a printer that has configuration options to check and set the font family, font size etc. ioctl could be used to get the current font as well as set the font to a new one. A user application uses ioctl to send a code to a printer telling it to return the current font or to set the font to a new one.
In these program below:
We archieve a communication among
User Space, Kernel Space and External Device Space by using
ioctl
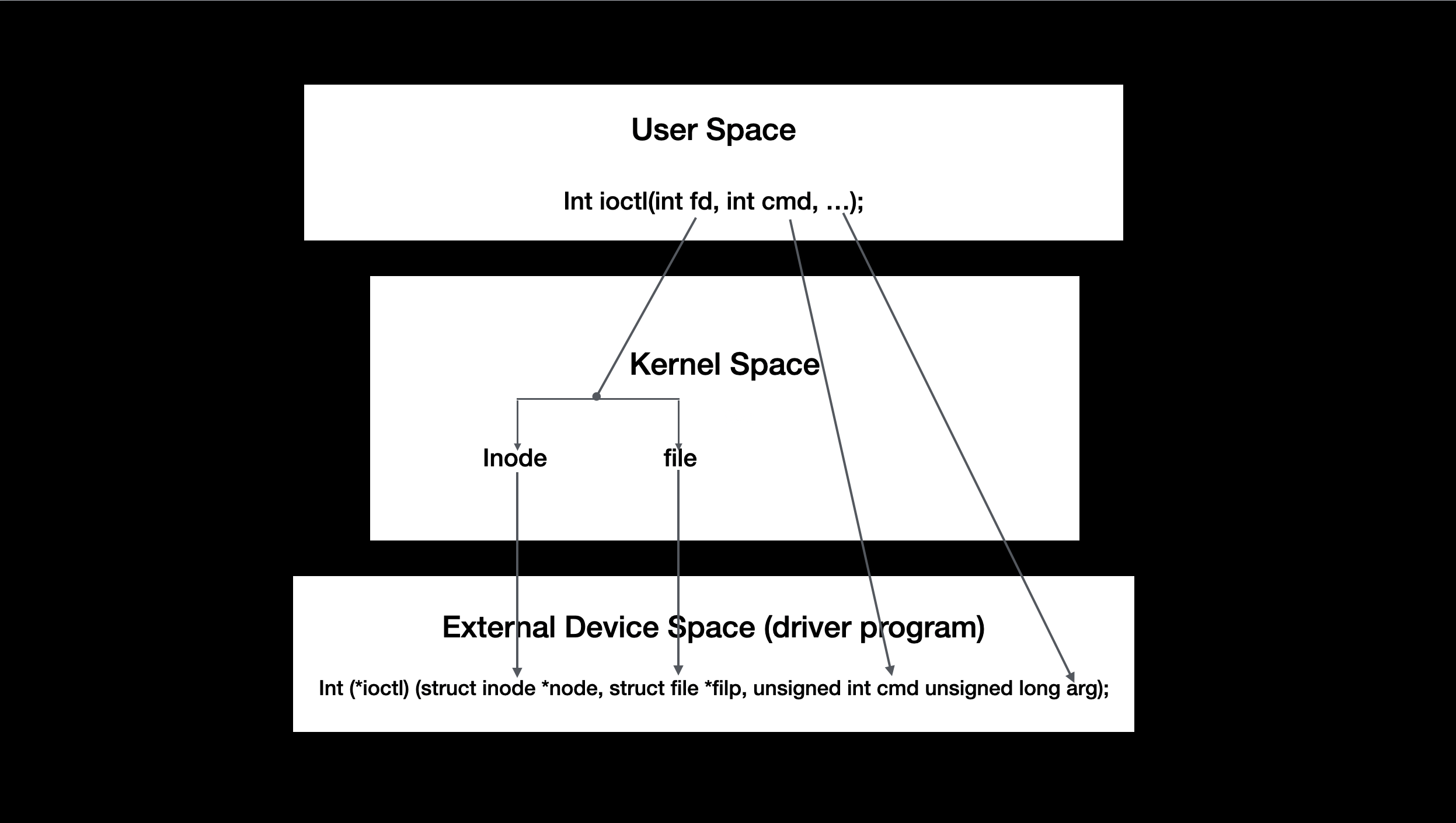 As we can see that: After User call
As we can see that: After User call
ioctl, the kenel just do these things:
*
find the correspound inode and file of
the fd * process the cmd by divide them (4
parts) * take the argument * Passing
all of them to the specific location of the device space
fcntl – manipulate file descriptor
The fcntl is
pretty same like ioctl, further difference we will metioned
when I learn more details of it in further study
access – check user’s permissions for a file
int access
(const char pathname(pointer), int mode);
The
access system call is used to determine whether a certain file access is
permitted by the protection system,access() checks whether
the calling process can access the file pathname.
The mode specifies the accessibility check(s) to be
performed, and is either the value F_OK, or a mask
consisting of the bitwise OR of one or more of R_OK,
W_OK, and X_OK. F_OK tests for
the existence of the file. R_OK, W_OK, and
X_OK test whether the file exists and grants read, write,
and execute permissions, respectively.
On success (all requested permissions granted, or mode is
F_OK and the file exists), zero is returned. On error (at least one bit
in mode asked for a permission that is denied, or mode is F_OK and the
file does not exist, or some other error occurred), -1 is returned, and
errno is set appropriately.
rename – change the name or location of a file
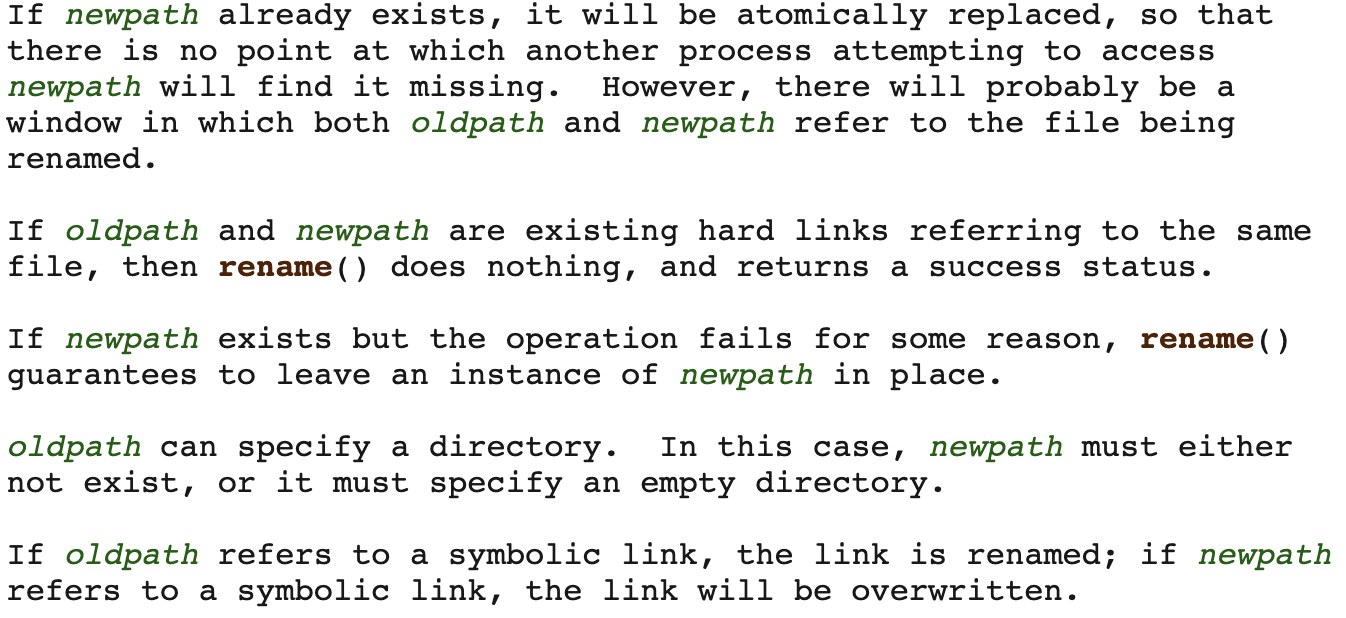
int rename (const char oldpath(pointer), const char newpath(pointer));
rename() renames a file, moving it between
directories if required. Any other hard links to the file (as created
using link()) are unaffected. Open file descriptors for oldpath are also
unaffected.
Here are some things need to be noticed (from man7.org)